Urban Gust Optimized Uav
Created by
@scorchify
10/20/2025 - Created and Formatted Project BOM
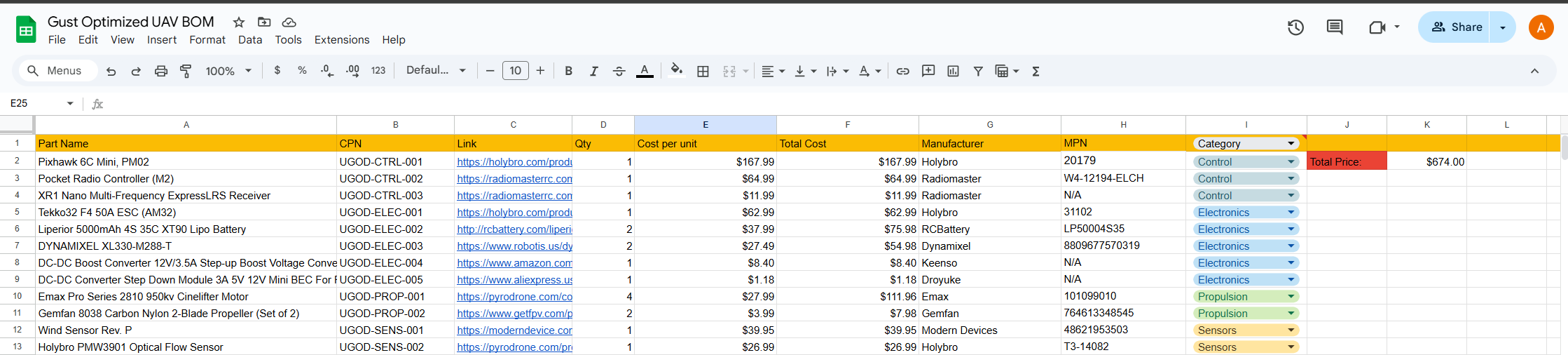
I made a list of numerous parts that will be used to build GOUAV, formatting it in a BOM made in google sheets. From my previous Notion version, I added a CPN naming system and removed unnecessary parts.
V1:
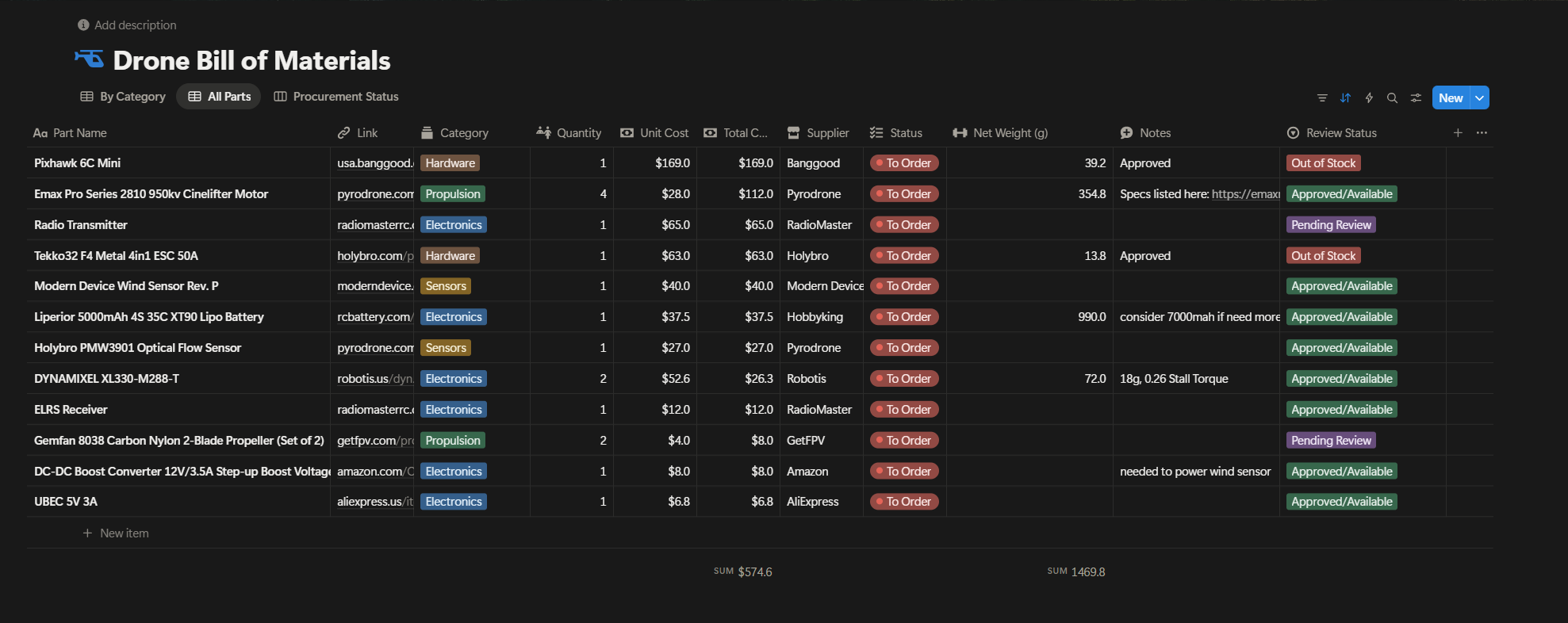
V2:
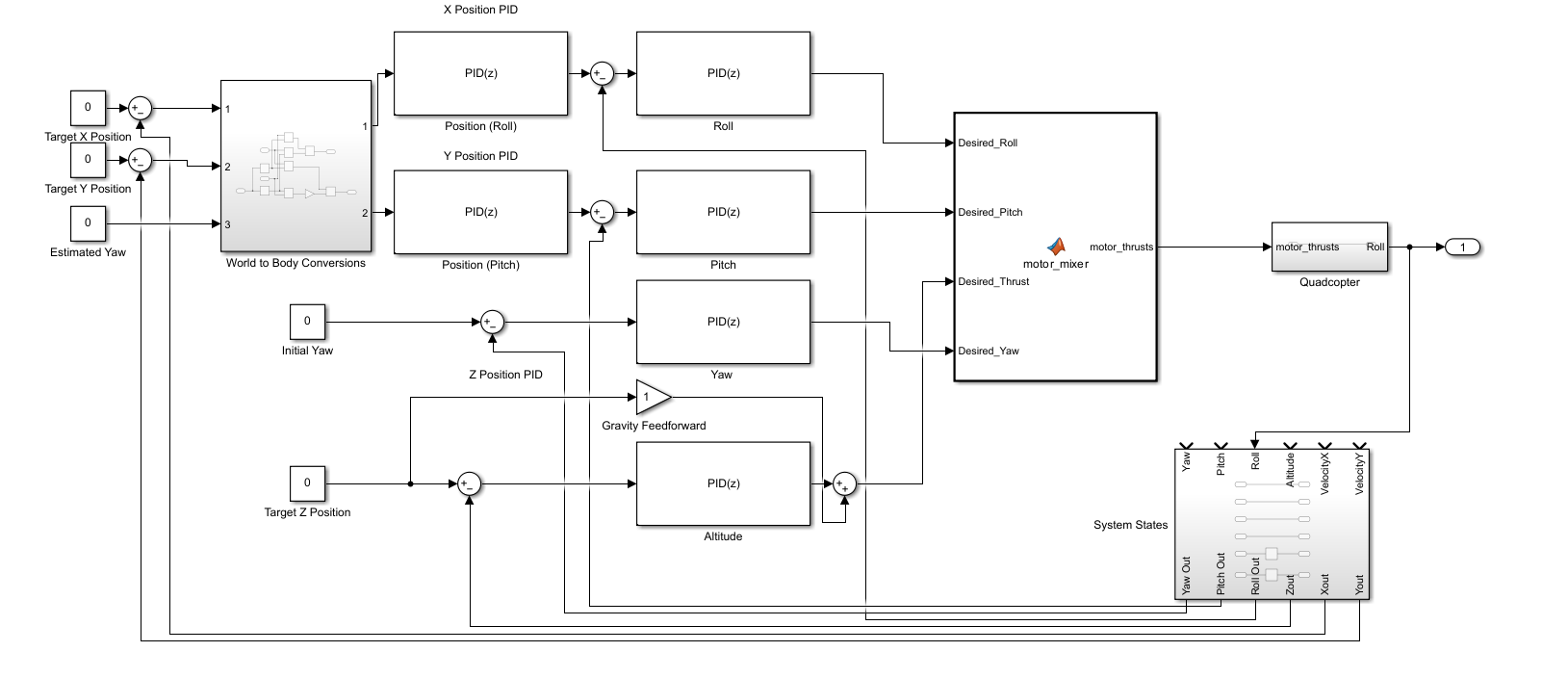
10/26/2025 - Mocked up PID Control Model in Simulink
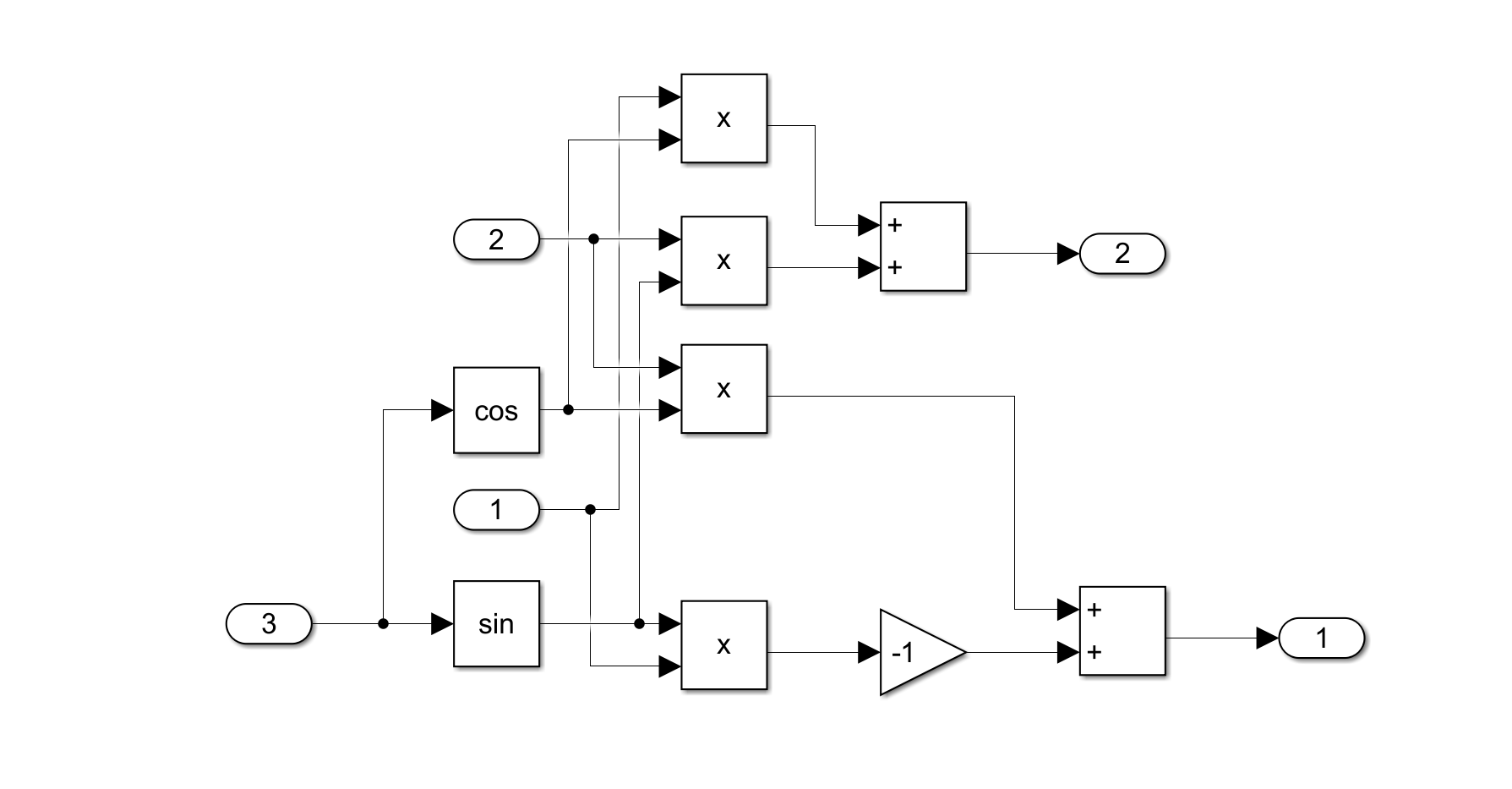
I spent time remembering how to use MATLAB and Simulink (and the math/structure behind the models) After watching a Brian Douglas Video on the MATLAB Youtube Channel about Drone PID System, I applied the knowledge and mocked up a control system for GOUAV. This is one of the three control models I wish to test, with this model being used on the fixed-frame trial of our drone. I hope to adapt this model for our morphing trial.
World to Body Conversions:
 Overall Model:
Overall Model: